
| ★阿修羅♪ > 自然・天文1 > 210.html ★阿修羅♪ |
|
| Tweet |
(回答先: 小惑星探査ロボット行方不明、軌道外れる?(読売新聞) 投稿者 熊野孤道 日時 2005 年 11 月 13 日 01:17:24)
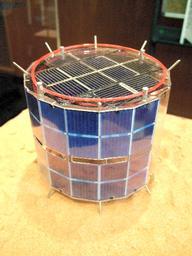
はやぶさがイトカワに投下した小型探査ロボット「ミネルバ」の模型=神奈川県相模原市で
朝日新聞からhttp://www.asahi.com/national/update/1112/TKY200511120242.htmlより引用
探査機「はやぶさ」、投下したロボットが行方不明
2005年11月12日21時45分
地球から約2億9000万キロ離れた小惑星「イトカワ」の観測を続けている宇宙航空研究開発機構の探査機「はやぶさ」は12日午後3時半ごろ、イトカワへ小型探査ロボット「ミネルバ」を投下したが、イトカワ表面には到達せず、行方不明になった。13日以降、ミネルバの所在を確認するが、予定した表面観測は難しくなった。はやぶさは19日と25日には、予定通り探査の最大の目的であるイトカワへの着陸と試料採取に挑む。
宇宙機構によると、ミネルバは高さ10センチ、重さ約600グラムの円筒形をした手のひらサイズのロボット。本来、はやぶさがイトカワまで約60メートルの距離で分離、投下する予定だったが、地上からの分離指令が届いた時、はやぶさは予想以上に高い約200メートルの位置にいた。
はやぶさは上昇中で、想定よりわずかに速い速度でミネルバを放出、地球の10万分の1ほどしかないイトカワの重力につかまらなかった模様だ。はやぶさとの通信は一部維持されており、イトカワの付近に漂っているらしい。人工衛星になっている可能性もある。ミネルバからのデータが地上まで届くのは13日夜以降で、宇宙機構はデータを解析して行方を探すことにしている。
はやぶさは、何もしないとイトカワの重力に引き寄せられ、落ちてしまうため、定期的にジェット噴射をしているが、指令のタイミングがずれると大きく上下動してしまう。これまでに起こった一部の姿勢制御装置の故障が、じわじわ響いている格好だ。
プロジェクトマネジャーの川口淳一郎教授は「不幸にして、ミネルバの投下はうまく行かなかった。姿勢制御装置の故障で、はやぶさがぎくしゃくした動きになっているが、修正して19日の着陸に臨みたい」と話した。今後の予定に変更はないという。
行方不明となったミネルバは、日本の宇宙探査史上初めて、小惑星表面での写真撮影と温度測定に挑むため開発されたロボットだ。小さな体にはさまざまなアイデアが詰め込まれていた。
遠いイトカワに地球からの指示が届くには時間がかかるため、自律的に動くように工夫されていた。重力が小さく、内部で回転する重りの反動を利用し、地表を1回のジャンプで5~10メートルも跳ね回って移動する仕組みになっていた。
惑星や小惑星、彗星(すいせい)などを探査する目的は、太陽系の起源や成立過程を調べることだ。ミネルバは、127億円の経費をかけたはやぶさの探査全体の中では「おまけ」的な存在だったが、そこから、太陽系の理解を深めるためのデータが一つでも得られれば、と関係者は期待していた。
はやぶさは今後、「ミューゼスの海」という地点に一瞬だけ着陸。金属球を表面に打ち込んで舞い上がってくる物質を採取し、07年6月に地球へ帰還する計画になっている。着陸時には岩を避けるため、30メートル四方の位置に下りなければならず、より難しい機体制御が必要だ。成功すれば、小惑星からの物質採取は世界で初めてとなる。
|
|
|
|
|
|
 題名には必ず「阿修羅さんへ」と記述してください。
題名には必ず「阿修羅さんへ」と記述してください。
|
|
|
|
|
|
|
|