|
|
| Tweet |
(回答先: Re: テスト 投稿者 クエスチョン 日時 2004 年 8 月 07 日 09:59:06)
トンボくらいの大きさにするのもそれほど先のことではないらしい。そのうち、鼻先を飛び回る蝿がスパイロボットなんて事に、、、。
********************************************************************************
フォトレポート:エプソン、小型飛行ロボット「μFR-II」を公開【CNET_Japan記事】
http://japan.cnet.com/news/tech/story/0,2000047674,20070560,00.htm
永井美智子(CNET Japan編集部)
2004/08/19 08:30 Trackback (0)
セイコーエプソンは8月18日、自律飛行が可能な小型飛行ロボット「μFR-II」の飛行実験を報道陣に公開した。飛行ロボットとしては「世界最軽量」(同社)というこのロボットは、電池も含めた重さが12.3g。8月27日から東京国際フォーラムで開催される「未来創造フェスタ~先端技術フェア~」で一般に公開される。

μFR-IIの離陸シーン
52K
331K
Windows Media Player

μFR-IIの着陸シーン
52K
331K
Windows Media Player
μFR-IIが動く様子:制御サーバを通じて手動で操作する。自律飛行もできるとのことだが、実験当日はPCの故障もありうまくいかなかった
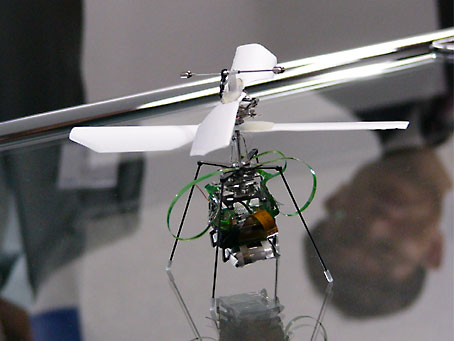
μFR-II:飛行可能時間は約3分。CMOSカメラを搭載し、撮影した画像をモニターに転送することも可能だ

重さは本体のみで8.6g、電池を含めると12.3g。大きさは直径13.6cm、高さ8.5cm。手のひらに載るほどで、人の顔よりも小さい
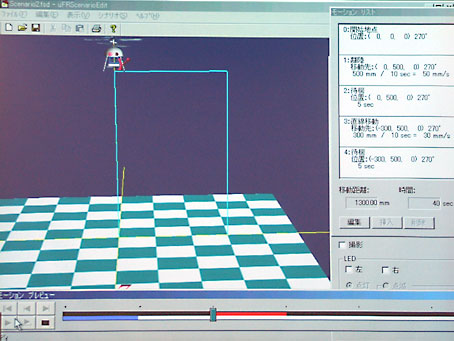
飛行経路シナリオのPC画面:3Dで飛行経路などを設定できる。実際の飛行経路を確認することも可能という
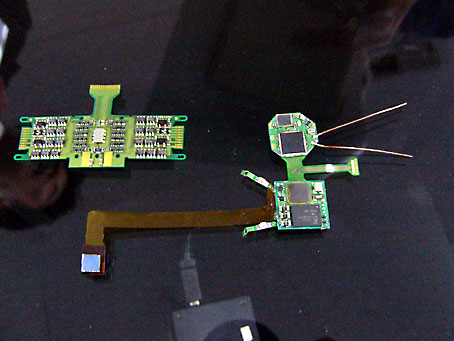
回路部品:CMOSカメラ、ジャイロセンサ、CPUなどを搭載。全体の部品点数は563個にのぼるという

μFR-IIの近未来イメージ図(1):目的地付近まで母船に乗って移動する。母船についたカメラでμFR-IIの位置を把握し、無線を介して制御する

μFR-IIの近未来イメージ図(2):人間が行けないような場所に送り込み、複数で作業することで効率化を図る
関連記事
エプソン、重さ8.6gの飛行ロボット「μFR-II」を発表
 題名には必ず「阿修羅さんへ」と記述してください。
題名には必ず「阿修羅さんへ」と記述してください。